

Descarga este artículo en formato pdf
Una nueva visión de arqueología bajo el dosel: beneficios de la tecnología LiDAR
Introducción
Prospección arqueológica en el verde bosque tropical Maya presenta desafíos en la búsqueda de yacimientos arqueológicos por descubrir, sin embargo la mayoría de los grandes sitios han sido identificados y localizados (Fig.1). Estrategias de mapeo tradicionales han implicado encuestas de áreas específicas, por lo general alrededor de los principales centros, tales como Tikal (Carr y Hazard 1961). Más tarde, las encuestas se expandieron en áreas fuera de los centros, como ei trabajo entre Tikal y Yaxhá (Ford 1986). Estos datos nos han dado muestras de paisajes antiguos que se pueden proyectar a través de áreas más amplias, como lo he hecho en el contexto de los SIG (Ford y Clarke 2005; Ford et al. 2009; Ford et al. 2011). Estos datos han sido de gran utilidad en la predicción de patrones residenciales Mayas a través de la zona del alto Río Belice (Fig.2) y más allá. Mientras que las técnicas tradicionales de la encuesta han proporcionado resultados a pesar de las limitaciones de la espesura del bosque, la nueva tecnología LiDAR tiene el potencial de ser un gran cambio para la Arqueología (Corns y Shaw 2009; Doneus et al. 2008; Johnson y Ouimet 2014; Riley y Tiffany 2014; Rosenswig et al. 2013) particularmente en las zonas boscosas como las tropicales y la selva Maya (Chase et al. 2011, 2012; et al. 2013). La reciente contribución de Mayaniquel de Guatemala de los datos LiDAR (Light Detection And Ranging) para la Reserva Arqueológica de El Pilar para Flora y Fauna Maya ofrece una nueva visión notable que amplía nuestra comprensión de la ocupación Maya en el sitio. Utilizando esta tecnología, podemos identificar fácilmente los grandes templos y localizar con precisión en el paisaje con extraordinaria precisión espacial. ¿Es esta la nueva varita mágica? ¿Cómo van los arqueólogos a integrar esta nueva herramienta? ¿Cuáles son sus potencialidades para el descubrimiento?
El Pilar es un lugar ideal para desarrollar el nuevo protocolo de estudio de campo de la integración de la tecnología LiDAR debido a la comparación con los estudios arqueológicos de campo tradicionales que se han llevado a cabo allí. Hemos estado trabajando en el lugar por más de 20 años y hemos asignado la principal arquitectura (Fig.2). En la selva Maya, las actividades humanas han tenido poco impacto posterior desde la monumental infraestructura Clásico Maya que fue abandonada en torno al CE 900. Ahora, un área protegida en Belice y Guatemala, hay una necesidad de una comprensión de los restos culturales de El Pilar como parte del proceso de planificación del desarrollo binacional. Por lo tanto, los resultados del proyecto de validación de elementos dentro de las imágenes LiDAR y el desarrollo de un mapa completo del paisaje Maya de El Pilar, con un protocolo definido, proporcionarán información vital para la investigación de patrones de asentamiento y también el manejo adaptativo del sitio en Belice y Guatemala.
Aplicación de LiDAR en El Pilar
LiDAR es un método basado en láser para teledetección. Capaz de penetrar la capa de vegetación y dosel del bosque en alta resolución y con extraordinaria precisión. Simultáneamente LiDAR crea imágenes de superficie del dosel, la biomasa en medio, y la superficie que se interpreta como el último rebote del pulso láser que refleja toda la “nube de puntos” (White 2013; Fig.3). Se ha argumentado que LiDAR está al momento de generar un cambio fundamental en la Arqueología con el potencial de transformar la investigación en áreas boscosas en todo el mundo. El proyecto LiDAR de El Pilar es parte de esta revolución arqueológica mundial.
Con LiDAR, muchos tipos de características de la superficie son visibles en las imágenes. El éxito en la identificación de estructuras construidos por LiDAR depende de la utilización en SIG de algoritmos interpretativos robustos para extraer elementos de la nube de puntos. En otras palabras, los datos de LiDAR deben ser decodificados para interpretar los elementos culturales, y para nosotros es un trabajo en progreso. La mayoría de arqueólogos con acceso a LiDAR utiliza el modelo de visualización de “bare earth” para la inspección remota de sitios. La visualización de “bare earth” identifica los edificios grandes claramente. ¿Pero cómo son detectados los elementos pequeños en el paisaje?
En este trabajo se ha experimentado con 15 distintos métodos de visualización y se comparaba cada imagen (Fig.4). Huellas de elementos culturales, topografía natural, y lo que se llamaron elementos ambiguos variaron entre las diferentes visualizaciones. Hay elementos que pueden ser artificiales, los resultados de los procesos SIG de las visualizaciones (Pingel y Clarke 2015). Se aparecen elementos artificiales con el procesamiento de datos y podría ser el despliegue de palmas, como la palma Corozo, o la ampliación de las raíces de los árboles grandes, como los árboles de Amate y Ramón. Más experimentación de estas relaciones ayudará a definir las variaciones en las imágenes. Mientras que las diferentes visualizaciones tienen potencialidades particulares, una visualización fue especialmente buena para las características culturales: el bonemap (Fig.5).
La visualización de mayor éxito que hemos utilizado es el bonemap, o como puede traducirse mapa de hueso (Pingel 2012, 2015; Pingel y Clarke 2013, 2015; Pingel et al. 2013), llamada así porque los píxeles con valor de elevación fue modelada por imágenes de rayos X. La creación del bonemap implica dos etapas distintas de procesamiento en el contexto de SIG (Pingel et al. 2013, Pingel et al. 2013). En la primera etapa, los datos de la nube de puntos se procesan para crear un “Digital Feature Model” (DFM) que representa una superficie que ha sido deforestada en gran medida, reteniendo elementos sutiles sobre la superficie. En la segunda etapa, el DFM es “slope shaded” de una manera que mejora el detalle, y hace que la imagen resulte adecuada para el análisis visual. La técnica fue diseñada para permitir la retención de características muy sutiles, por ejemplo, senderos de tierra (Pingel 2015; Pingel y Clarke 2015). La preservación de elementos sutiles resultó ventajosa en aplicaciones arqueológicas, donde cualquier número de otros procesos puede haber reducido la prominencia de los elementos culturales. El resultado es el bonemap de El Pilar (Fig.6)
Desarrollando el Protocolo y Creando el SIG de los Datos Culturales
Con la implementación de la nueva herramienta digital, el LiDAR, en la investigación arqueológica su finalidad es el reconocimiento de área. Para hacer este, es necesario realizar una serie de pasos que se plantean para validar los elementos que han sido detectados a través de imágenes en LiDAR. La validación depende del trabajo con las imágenes dentro el contexto del SIG, la revisión en el campo navegando con el GPS, y la interpretación de los datos recolectados en el campo al SIG.
La primera fase es la del desarrollo de los puntos “go to” que interpretan remotamente las imágenes del “bonemap” con las facilidades del SIG. Luego se van al campo navegando con el GPS para validar los puntos y crear los datos, detallando con los croquis y observaciones en campo, y finalmente se descargan los datos para finalizar los mapas en el SIG. Este comprende tres fases.
Fase 1. Teledetección de la Imagen en el Laboratorio
1a La teledetección de los elementos para revisar en campo: Los elementos son patrones que pueden ser rasgos culturales para validar en el campo. Estos puntos son la base de la creación de una versión de puntos “go to” en la Reserva Arqueológica de El Pilar para la Flora y Fauna Mayas. El trabajo de campo es dependiente de este mapa de puntos. Estas actividades requieren de:
– Análisis de la nube de puntos
– La creación de datos de superficie basada en el rebote final
– El desarrollo de visualizaciones apropiadas con el SIG
– El monitoreo de la densidad de puntos de láser por superficie
– Revisiones visuales directas de las imágenes en SIG con sus propios ojos
– La producción de puntos notando los elementos para revisar en el campo
1b Análisis de Imágenes con sus propios ojos. Estas actividades requieren de:
– Revisiones visuales directas para crear los puntos “go to”
– La producción del análisis de las calidades de los puntos “go to”
– Notando el tamaño del punto, su intensidad, y si hay esquinas visibles
Fase 2: Validación de Elementos en el Campo
2a La inspección de puntos “go to” en el campo: Se eligen áreas de la muestra basada en topografía con el LiDAR para la validación de campo con GPS (Fig.7). Las áreas de muestreo incluyen tierras altas bien drenadas, las tierras bajas donde aumenta agua, se incluyen las áreas montañosas hacia el sureste y el pantano áreas del noroeste. Tomamos datos escritos conjunto con GPS. Estas actividades requieren de:
– Ir al campo navegando con GPS (Fig.8) a ubicar los puntos “go to” (Fig.7a) para determinar si existe evidencia cultural arqueológica
– Revisar la evidencia actual durante el reconocimiento de superficie como brechas o trocopases, veredas, infraestructura y evidencia histórica
– La inspección de lugares aparentemente ambiguos que tienen elementos ligeros
2b Llegada a puntos “go to”: Se navega con GPS para determinar si los elementos de teledetección representan evidencias culturales (Fig.7b). Estas actividades requieren de:
– Identificación de restos arqueológicos como montículos
– Búsqueda en un radio de 13 m del punto o evidencia
– Determinar presencia de plataforma o plaza
– Ubicar chultunes o canteras, si hay depresiones o aguadas y otras cosas notables
– Orientación de evidencia como montículos (Fig.9)
– Medidas de largo y ancho con cinta métrica
– Inicio trazo de cróquis con los elementos resaltados
– Toma de alturas por ejemplo de montículos o canteras y medidas de depresiones
– Fijar el sitio usando un lugar clave, como una estructura principal
– Tener más tiempo de lectura en el GPS y obtener una mejor precisión
– Se prolonga el promedio del lugar a 3 minutos para fijar el punto
– Puntear toda la vuelta de los elementos con GPS, como los montículos (Fig.7b).
– Colecciones de puntos iniciando con evidencia al norte
– Siguiendo opuesta las agujas de reloj: NOSE, norte, oeste, sur y este
– Incluir en notas de elementos y sus alrededores:
– Evaluación de la vegetación, del dosel, y sotobosque
– Clasificación de los árboles dominantes
– Confirmando los datos con el croquis
Fase 3: Descargar Datos del Campo con SIG en el Laboratorio
3a Compilar los datos de campo: Bajar la información de GPS a la computadora que opera el SIG.
– Iniciar el postproceso de la información generada en campo
– Realizar los puntos rechazados y los aceptados para dibujar (Fig.7c)
– Tomar en cuenta los resultados en los atributos conjuntos con los puntos mapeados.
3b Revisión y definición del mapeo:
– Integrar los mapas del sitio con la base de datos de campo que constituyen la validación si estaban aceptados como sitio cultural o no. Se combinan los datos en el SIG con los datos LiDAR para desarrollar el mapa de El Pilar.
– El análisis de los rasgos arquitectónicos y las características de vegetación y topografía
– La integración de información actualizada (brechas, veredas, infraestructura, etc.).
– Crean capas temáticas (layers) con los datos del GPS, los mapas de los descubrimientos, y los atributos de lugares que son la base de la creación del nuevo mapa de la Reserva Arqueológica de El Pilar.
– Realizar la técnica remota de LiDAR es vara mágica sólo cuando se complementa con Arqueología
de campo.
La Reserva Arqueológica El Pilar para Flora y Fauna Maya incluye una totalidad de 20 km2. El centro con sus restos monumentales al este y oeste conforman el núcleo monumental de cinco conjuntos: la Ciudadela, Nohol Pilar, Xaman Pilar (Fig.6), la calzada que amarra el este al oeste con una plaza hundida con un juego de pelota, y Pilar Poniente. El trabajo de reconocimiento ha completado 5.4 km2, el cual corresponde a un cuarto de la reserva. Dentro de este cuarto del área de reserva de El Pilar se pueden contabilizar 579 sitios culturales. Esto incluye unidades residenciales, aguadas, canteras, y otros rasgos culturales prehispánicos. De las unidades residenciales en los 5.4 km2, contamos con 537 estructuras domésticas que constituyen el promedio de 2.1 estructuras por unidad residencial y representan 49 unidades por km2.
Los resultados de los trabajos de campo eran la búsqueda de elementos visibles en el LiDAR de El Pilar. Hablan de la revolución a la que se refieren Chase et al. (2012), Mas el trabajo sólo comienza con el procesamiento remoto del SIG con los datos LIDAR en laboratorio. Esto permite la puesta en práctica del nuevo protocolo de reconocimiento en la selva Maya. Con la implementación del LiDAR con Arqueología se ha logrado agilizar levantamiento topográfico y el reconocimiento arqueológico. Ahora con LiDAR se pueden hacer reconocimientos sin establecer brechas, sin cortar árboles, conservando la selva. La extracción remota de las características de elementos visibles promueve el desarrollo de puntos “go to” que dirigen la inspección directa del terreno. Con la inspección de una arqueóloga ajusta la evidencia en el campo para validar asociaciones con restos antiguos. Ya que no podemos como arqueólogos confiar solamente en el LiDAR.
Conclusiones
La experiencia de desarrollar el nuevo protocolo de reconocimiento bajo el dosel de la selva Maya muestra la necesidad de sabiduría arqueológica. LiDAR lleva muy buenas noticias para la Arqueología Maya y otros lugares boscosos. LiDAR no es la vara mágica en si, adquiere un análisis de las imágenes digitales de LiDAR y la integración de los datos recolectados en el campo. Los trabajos de teledetección y el estudio del campo son complementarios. Se ha demostrado que LiDAR, es una nueva herramienta encargada de guiar los recorridos y complementada conjuntamente con la Arqueología. Usando aparatos navegadores GPS, croquis de campo y cinta métrica, podemos validar los vestigios arqueológicos y determinar cómo podemos interpretar los rasgos y elementos que aparecen en las imágenes. Esta nueva visión ante la antigua cultura Maya con LiDAR depende de la integración de toda la experiencia de reconocimiento desde los primeros arqueólogos en la selva Maya.
Con los resultados probados y validados del LiDAR en El Pilar, tenemos una base de datos que permite entender el antiguo uso de la tierra Maya, para desarrollar y perfeccionar nuevos objetivos de la investigación arqueológica en la selva Maya y para contribuir con la gestión del manejo de los recursos culturales. Seguimos adelante con el reconocimiento de El Pilar, ahora con la confianza de un protocolo apropiado para la zona Maya.
Referencias
Carr, R. F. y J. E. Hazard
1961 Map of the ruins of Tikal, El Peten, Guatemala. Tikal Report 11. University of Pennsylvania, Philadelphia.
Chase, A. F.; D. Z. Chase, J. F. Weishampe, J. B. Drake, R. L. Shrestha, K. C. Slatton, J. J. Awe y W. E. Carter
2011 Airborne LiDAR, archaeology, and the ancient Maya landscape at Caracol, Belize. Journal of Archaeological Science 38:387-398.
Chase, A. F.; D. Z. Chase, C. T. Fisher, S. J. Leisz y J. F. Weishampel
2012 Geospatial revolution and remote sensing LiDAR in Mesoamerican archaeology. Proceedings of the National Academy of Sciences of the United States of America 109(32):12916–12921.
Chase Arlen F.; Diane Z. Chase, Jaime J. Awe, John F. Weishampel, Gyles Iannone, Holley Moyes, Jason Yaeger, Kathryn Brown, Ramesh L. Shrestha, William E. Carter y Juan Fernandez Diaz
2014 Ancient Maya Regional Settlement and Inter-Site Analysis: The 2013 West-Central Belize LiDAR Survey. Remote Sens. 2014, 6(9), 8671-8695; http://www.mdpi.com/2072-4292/6/9/8671/htm
Corns, A. y R. Shaw
2009 High resolution 3-dimensional documentation of archaeological monuments & landscapes using airborne LiDAR. Journal of Cultural Heritage 10S (2009) e72–e77.
Doneus, M.; C. Briese, M. Fera y M. Janner
2008 Archaeological prospection of forested areas using full-waveform airborne laser scanning. Journal of Archaeological Science 35: 882-893.
Ford, A.
1986 Population Growth and Social Complexity: An Examination of Settlement and Environment in the Central Maya Lowlands. Anthropological Research Papers No. 35. Arizona State University, Tempe.
Ford, A. y K. Clarke
2006 Predictive Modeling of Ancient Maya Settlements in the Belize River Area. Research Reports in Belizean Archaeology 3:75-87.
Ford, A.; K. C. Clarke y S. Morlet
2011 Calculating Late Classic lowland Maya population for the Upper Belize River area. Research Reports in Belizean Archaeology 8:193-212.
Ford, A.; K. C. Clarke y G. Raines
2009 Modeling settlement patterns of the Late Classic Maya with Bayesian methods and Geographic Information Systems. Annals of the Association of American Geographers 99:496-520.
Johnson, K. M. y W. B. Ouimet
2014 Rediscovering the lost archaeological landscape of southern New England using airborne light detection and ranging (LiDAR). Journal of Archaeological Science 43(9-20).
Pingel, Thomas J.
2013 Bonemapping: a LiDAR processing and visualization technique in support of archaeology under the canopy. Cartography and Geographic Information Science http://dx.doi.org/ 0.1080/15230406.2015.1059171. accepted 5 May 2015
2012 Automatic Methods of LIDAR Visualization: A Test Case in the El Pilar Archaeological Reserve for Maya Flora and Fauna. http://tpingel.com/documents/presentations/pingel.20121027.westEastLakes.pdf. vol. October 25-27, 2012.West Lakes East Lakes Joint Meeting of the Association of American Geographers, DeKalb, IL.
Pingel, T. J.
2010 Strategic Elements of Route Choice, University of California, Santa Barbara.
2015 Code Products. Digital document: http://tpingel.com/code/index.html. July 2015.
Pingel, T. J. y K. C. Clarke
2013 Bonemapping: a LiDAR processing and visualization technique in support of archaeology under the canopy. Cartography and Geographic Information Science http://dx.doi.org/ 0.1080/15230406.2015.1059171. accepted 5 May 2015.
2015 Perceptually Shaded Slope Maps for the Visualization of Digital Surface Models. Cartographica the International Journal for Geographic Information and Geovisualization 49(4):225-240.
Pingel, T. J.; K. C. Clarke y W. A. McBride
2013 An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS Journal of Photogrammetry and Remote Sensing 77:21-30.
Riley, M. A. y J. A. Tiffany
2014 Using LiDAR data to locate a Middle Woodland enclosure and associated mounds, Louisa County, Iowa 52:143–151.
Rosenswig, R. M.; R. López-Torrijos, C. E. Antonelli y R. R. Mendelsohn
2013 Lidar mapping and surface survey of the Izapa state on the tropical piedmont of Chiapas, Mexico. Journal of Archaeological Research 40(3):1493–1507.
Weishampel, John F.; Arlen F. Chase, Diane Z. Chase, y Jessica N. Hightower
2013 “Remote Sensing of Below-Canopy Land Use Features from the Maya Polity of Caracol,” En F. Djinjian y S. Robert, Eds., Understanding Landscapes: From Discovery through Land Their Spatial Organization, Archaeopress, British Archaeological Reports, Oxford.
White, D. A.
2013 LiDAR, Point Clouds, and Their Archaeological Applications. En Mapping Archaeological landscapes from Space, editado por D. C. Comer y M. J. Harrower, pp. 175-186. Springer, New York.
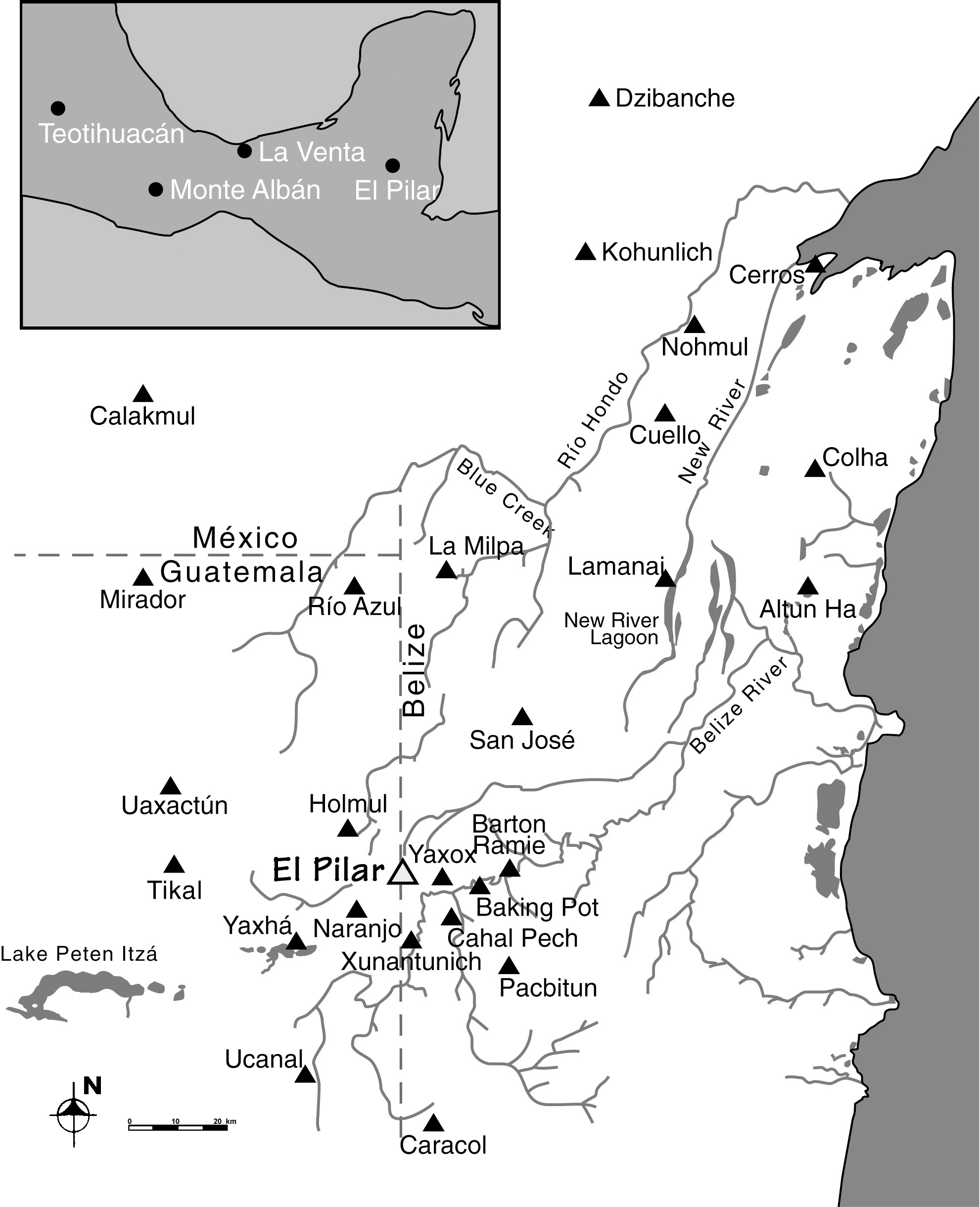
Fig. 1: Las Tierras Bajas Maya con el Centro El Pilar y Otros Centros Notado.
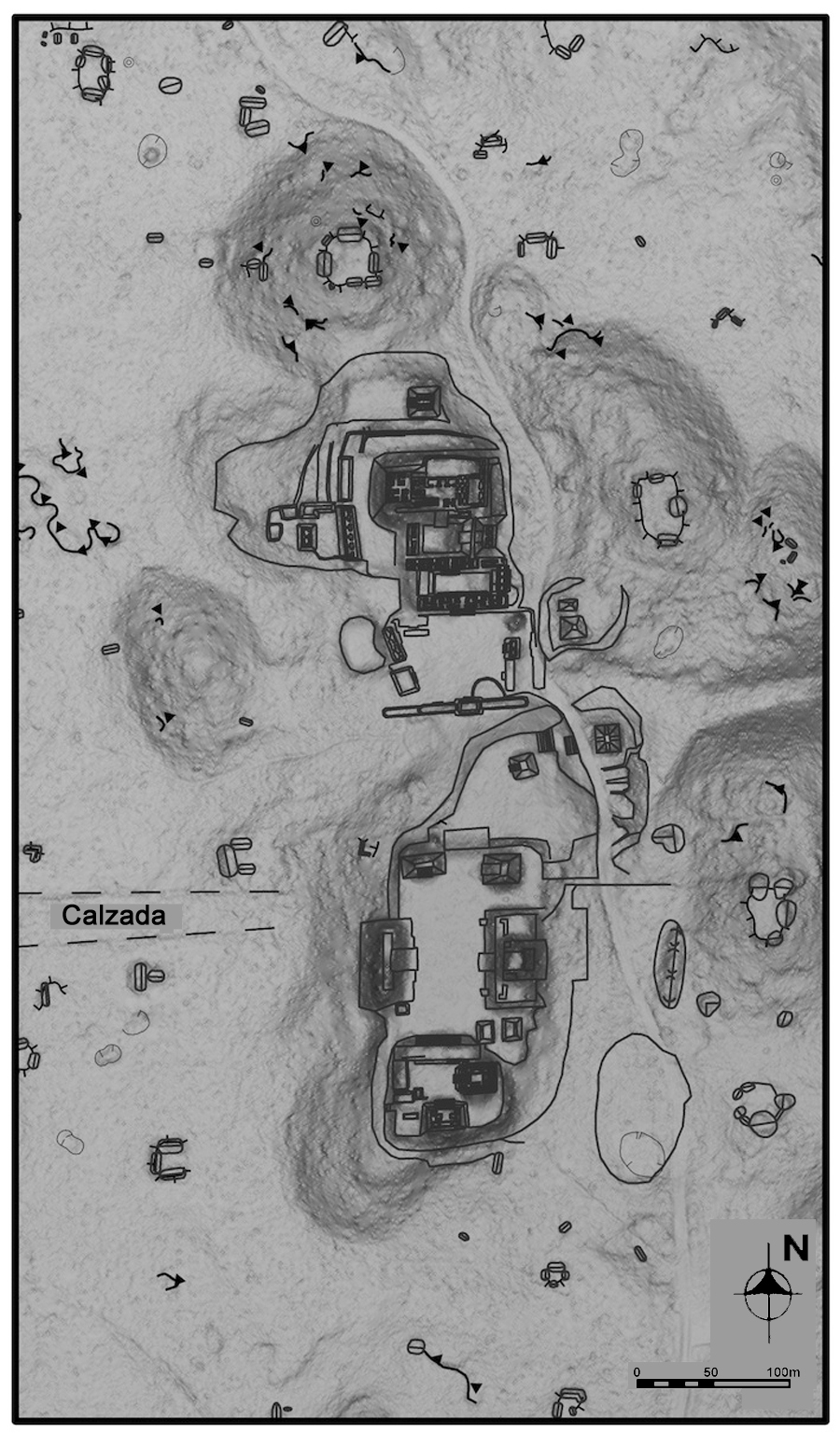
Fig. 2: El Mapa Dibujado con Teodolito sobre la Imagen de LiDAR representando Secciones Xaman al Norte, Nohol al Sur y parte del Calzada al Oeste.
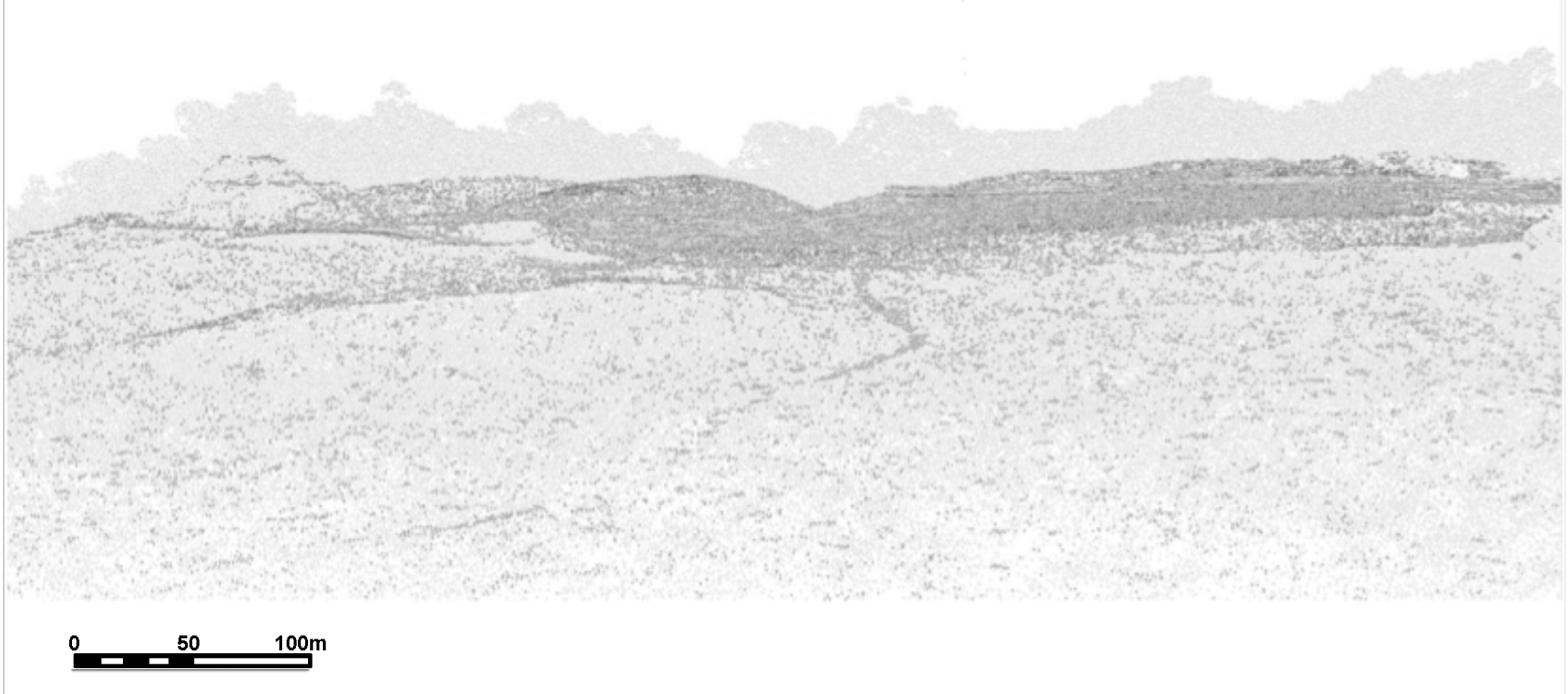
Fig. 3: La Nube de Puntos de El Pilar con los Obscuros Representando la Superficie y el Gris los Arboles. Nota la acrópolis del Xaman Pilar al izquierdo.
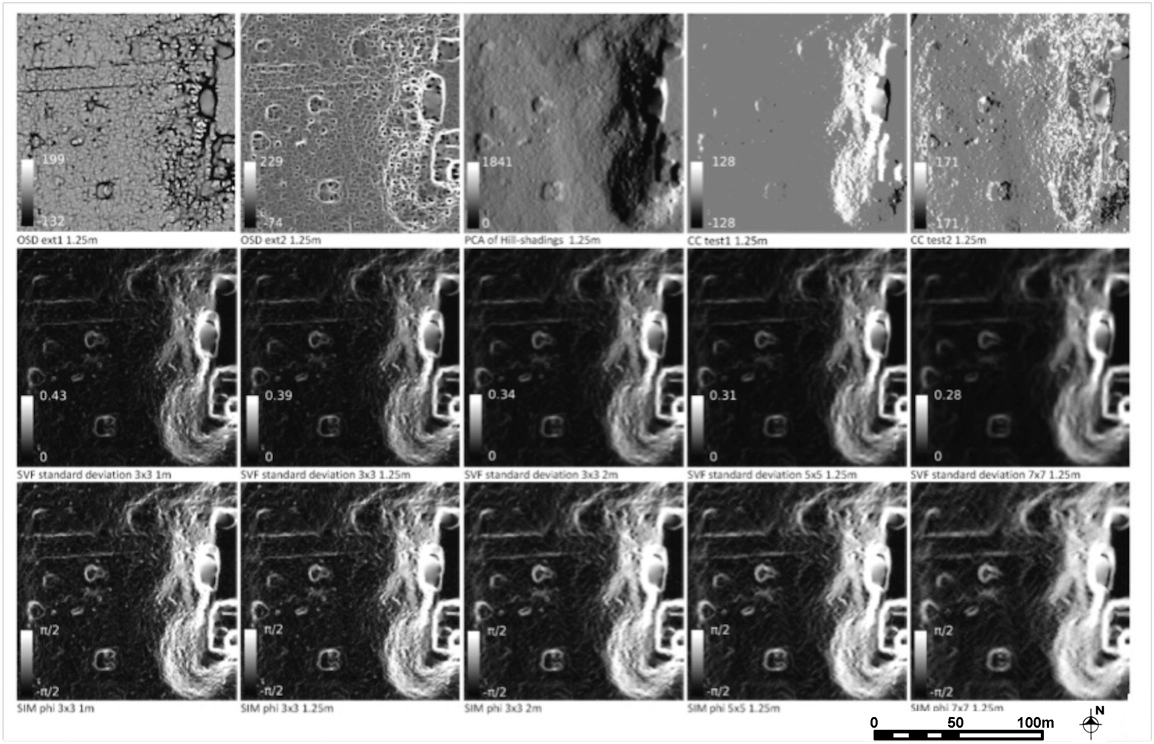
Fig. 4: Diferentes Imágenes con los Puntos del Último Rebote LiDAR.
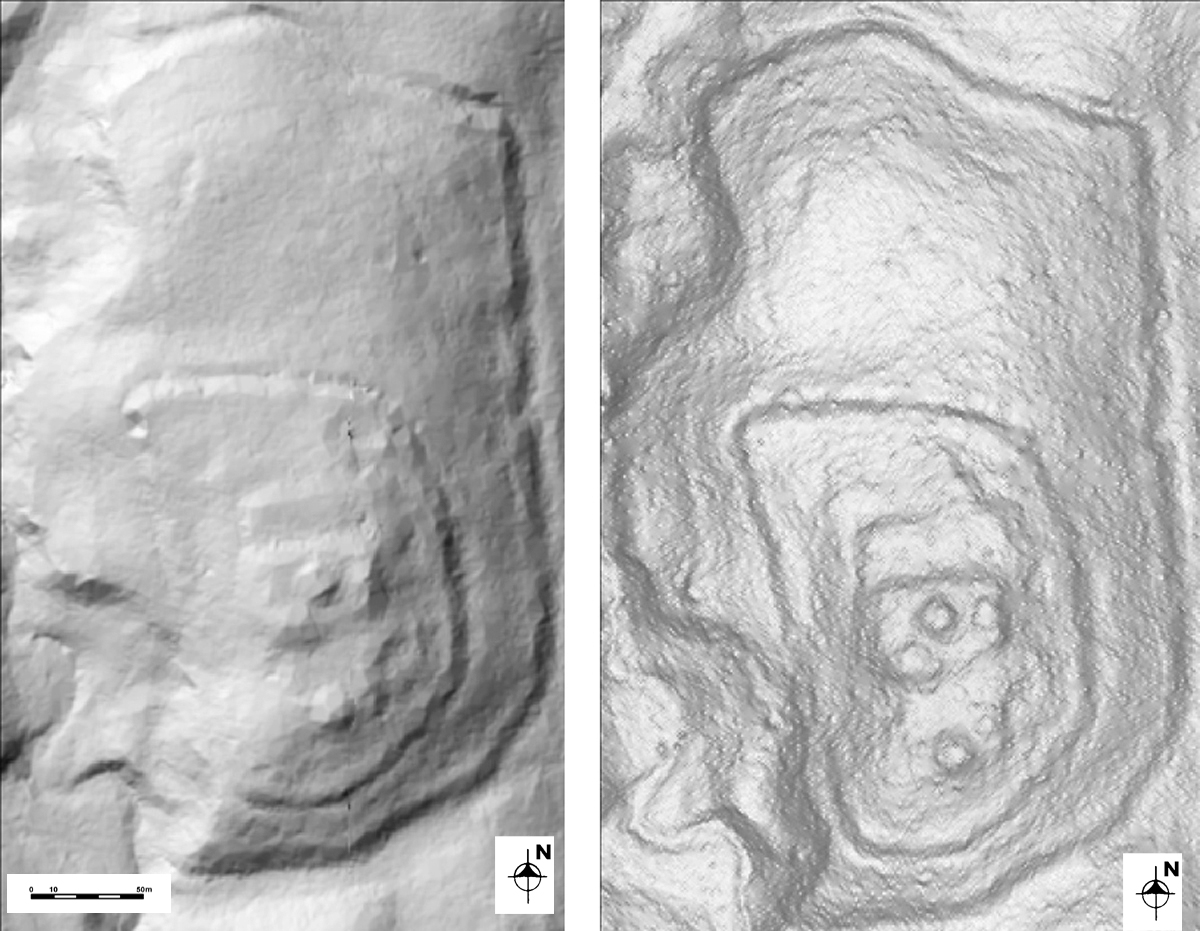
Fig. 5: Comparación de Imágenes LiDAR de Bare Earth y Bonemap de la Ciudadela.
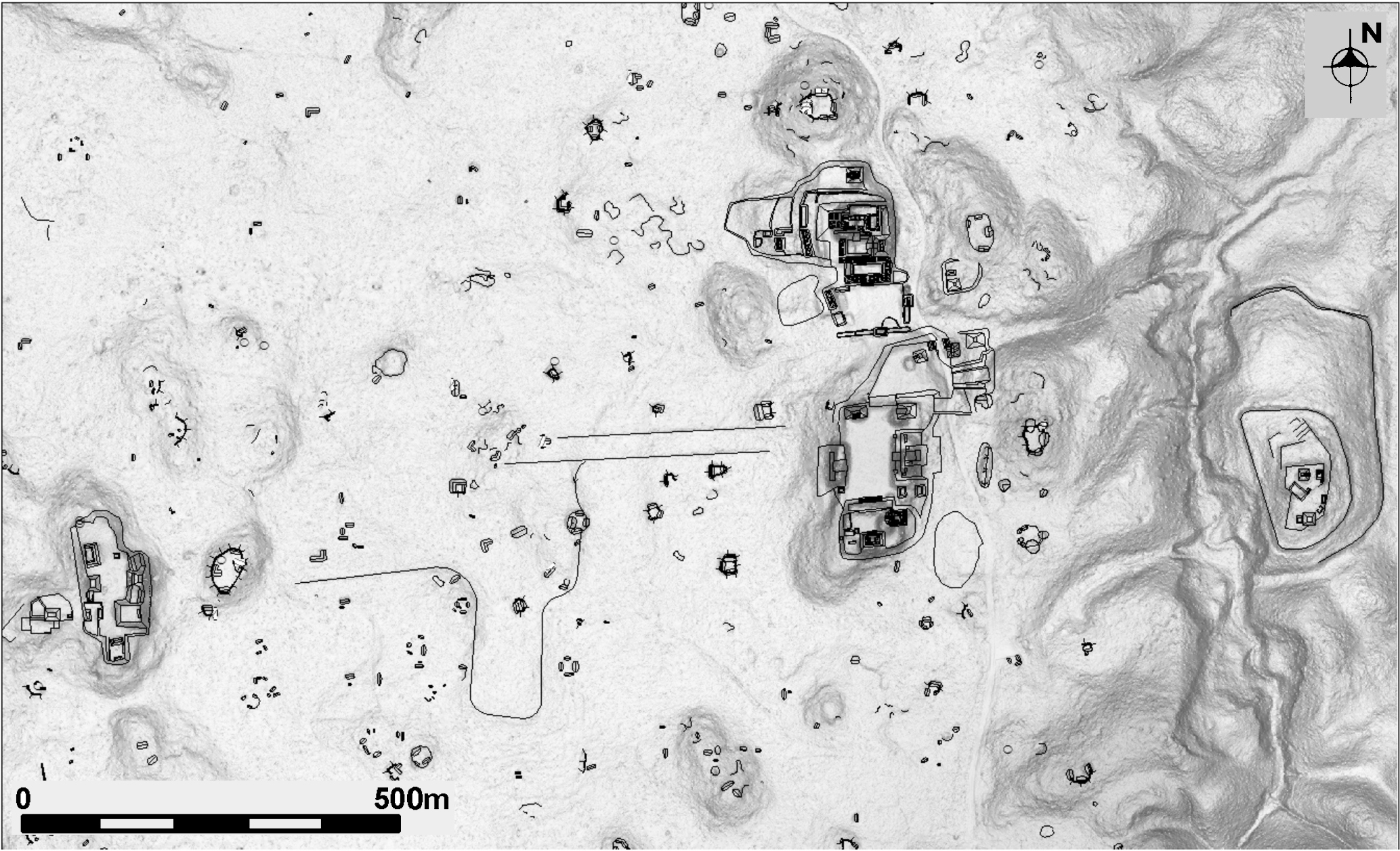
Fig. 6: Núcleo de El Pilar desde Pilar Poniente al Oeste hasta la Ciudadela al Este.
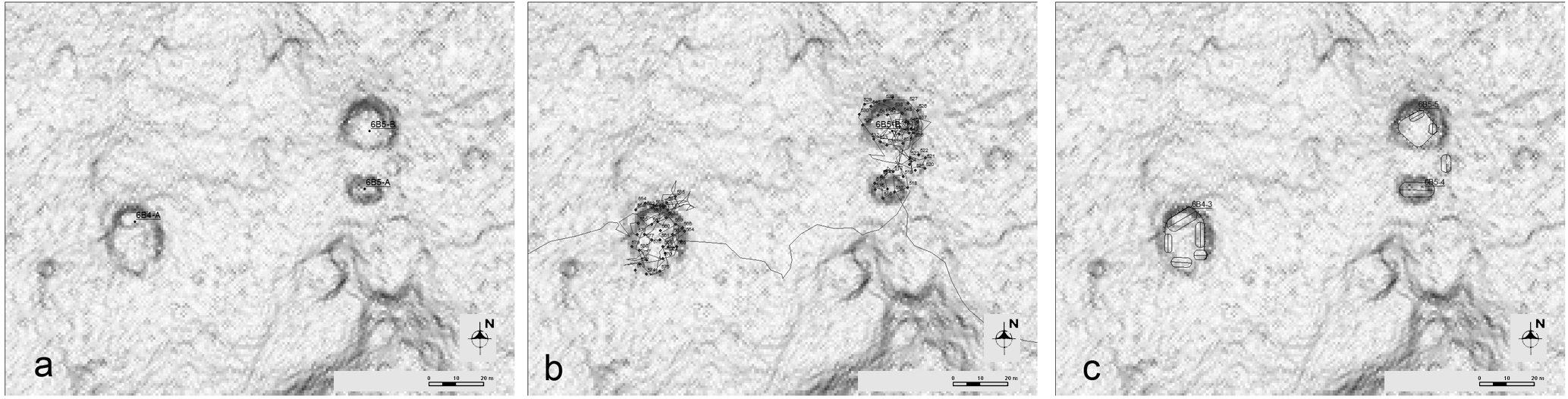
Fig. 7: Muestra de la validación de un día: a) Puntos “go to,”; b) Los Tracks y Waypoints; c) El Producto.
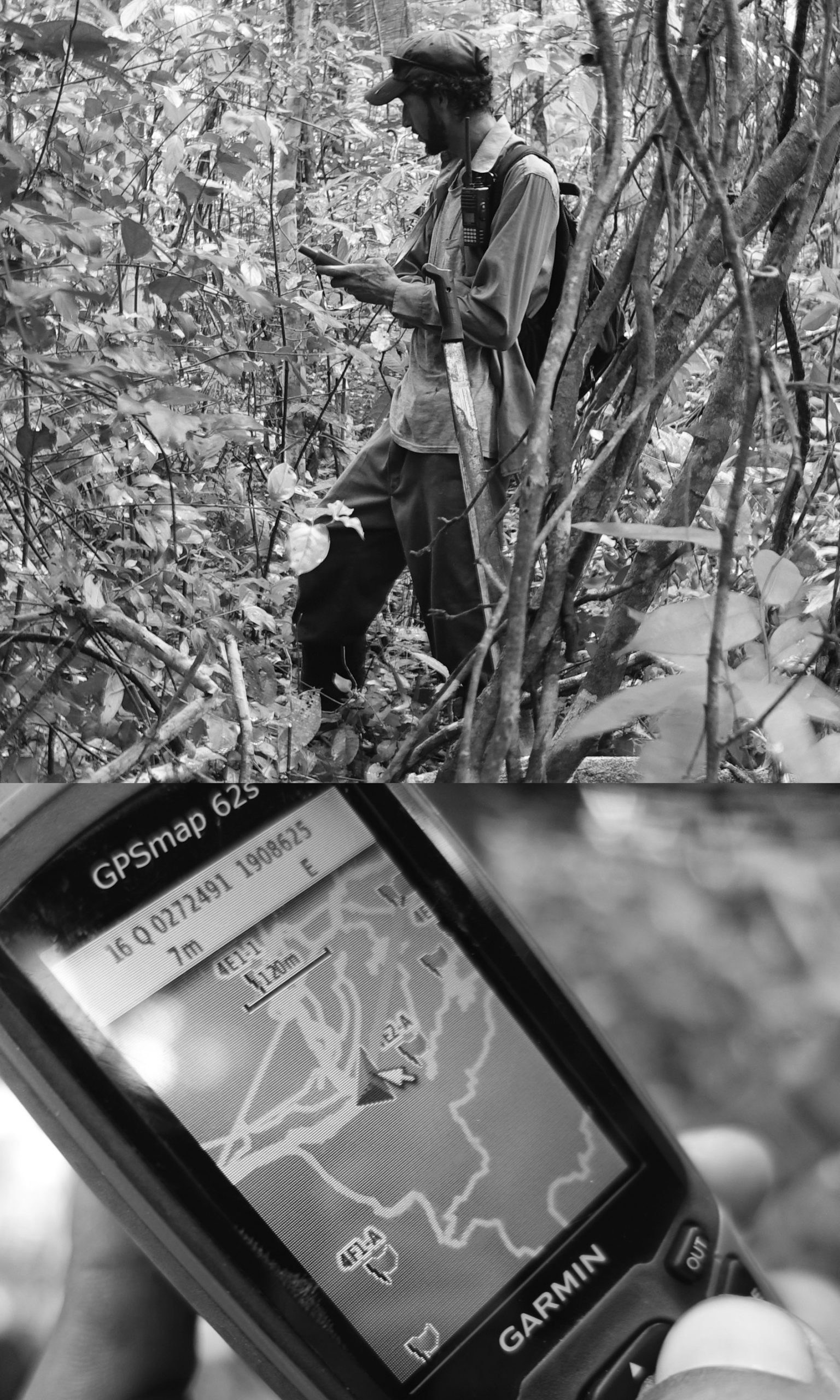
Fig. 8: Usando el GPS en las Selva y Marcando los Tracks.
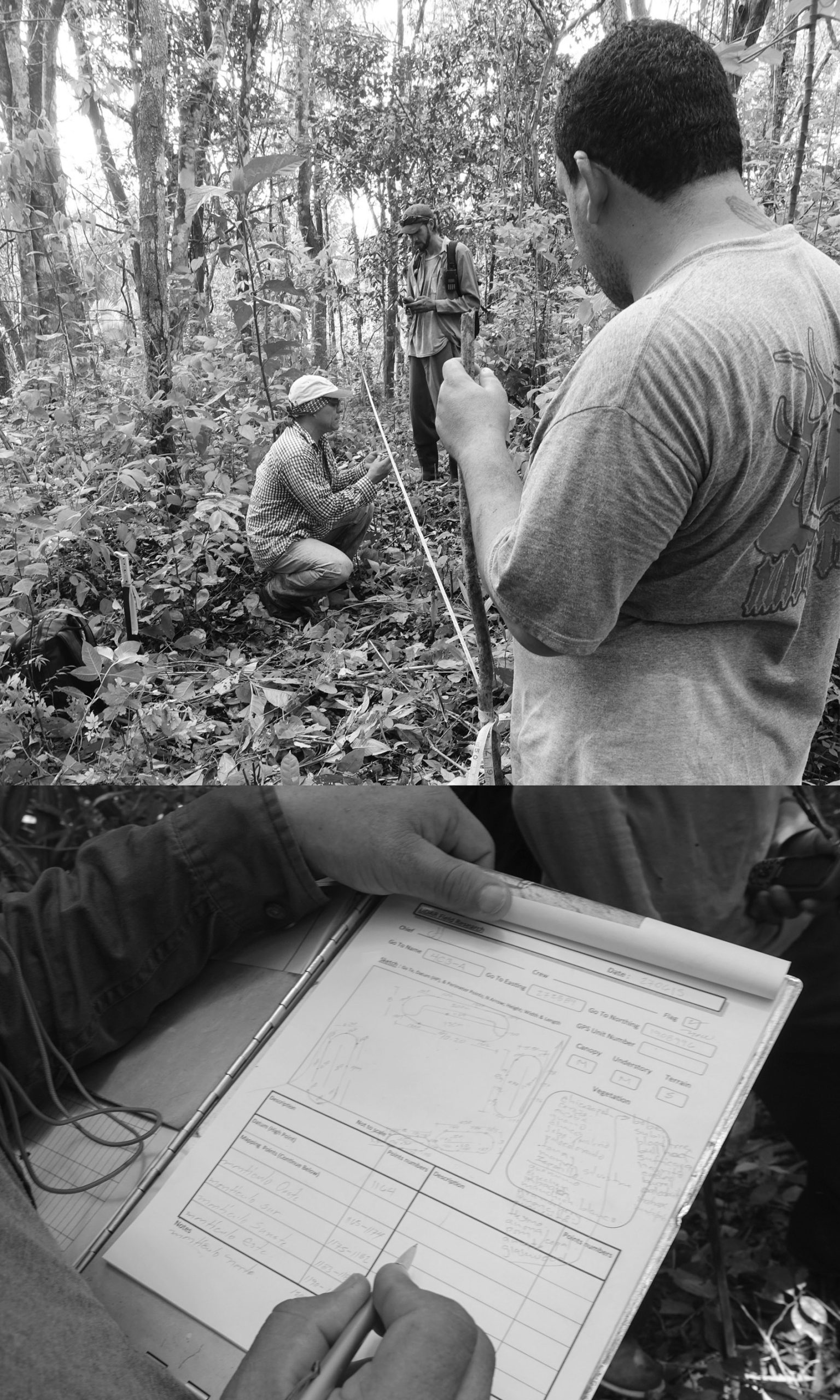
Fig. 9: Mediando Montículos y Dibujando Croquis.
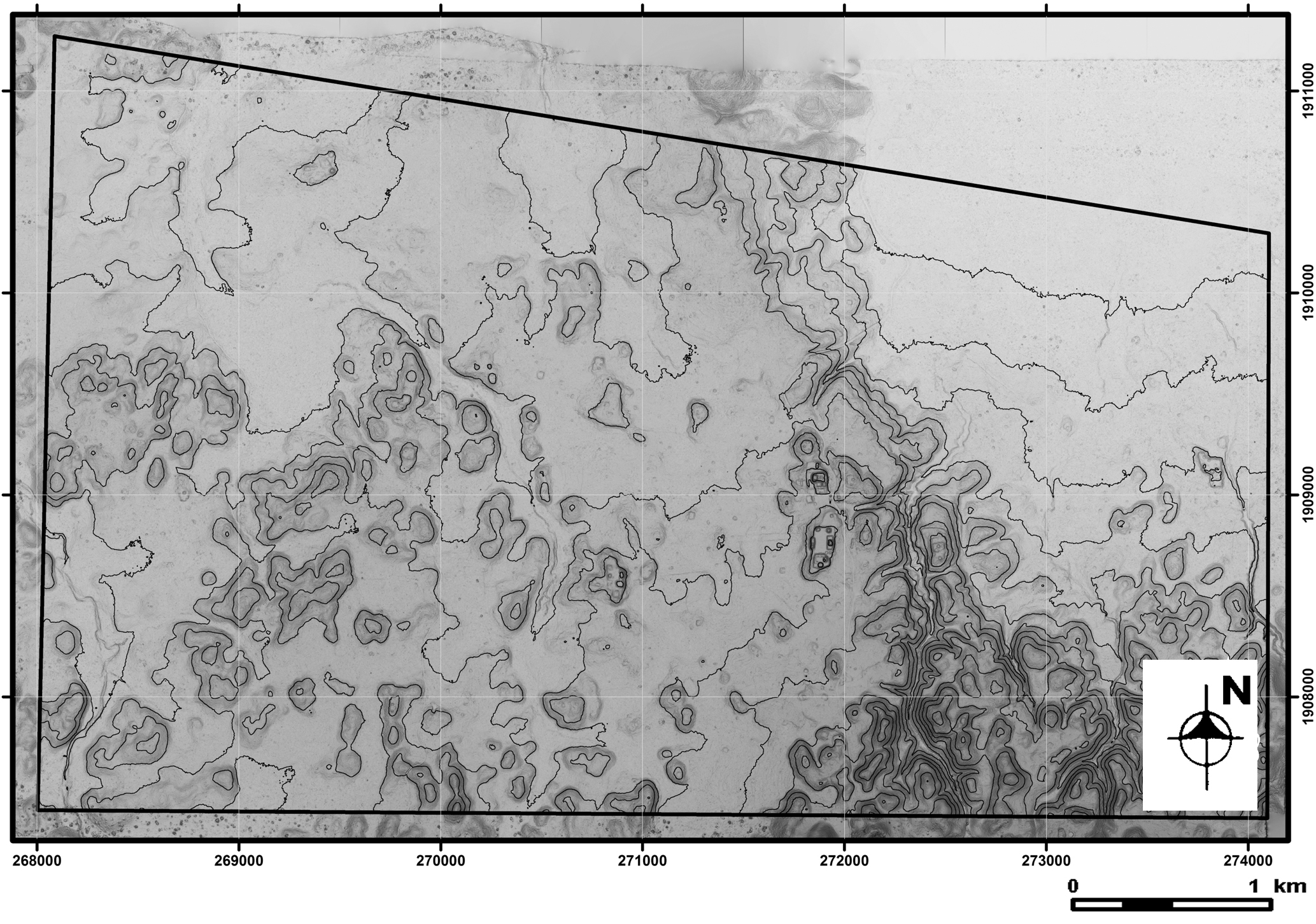
Fig. 10: Interpretación de Topografía (a 10 metros) de La Reserva Arqueológica El Pilar para Flora y Fauna Mayas con LiDAR.
| Aparato GPS | 1 | 2 | 3 | 4 |
| Modelo | Garmin® 62S | Garmin® 62S | Garmin® 62S | Garmin® Etrex10 |
| Método | Promedio | Instantaneo | Promedio | Promedio |
| Error | 7.4 m | 6.6 m | 8.3 m | 7.7 m |
Cuadro 1: Comparando Cuatro Aparatos de GPS Usado en el Reconocimiento de El Pilar.